Technical Description
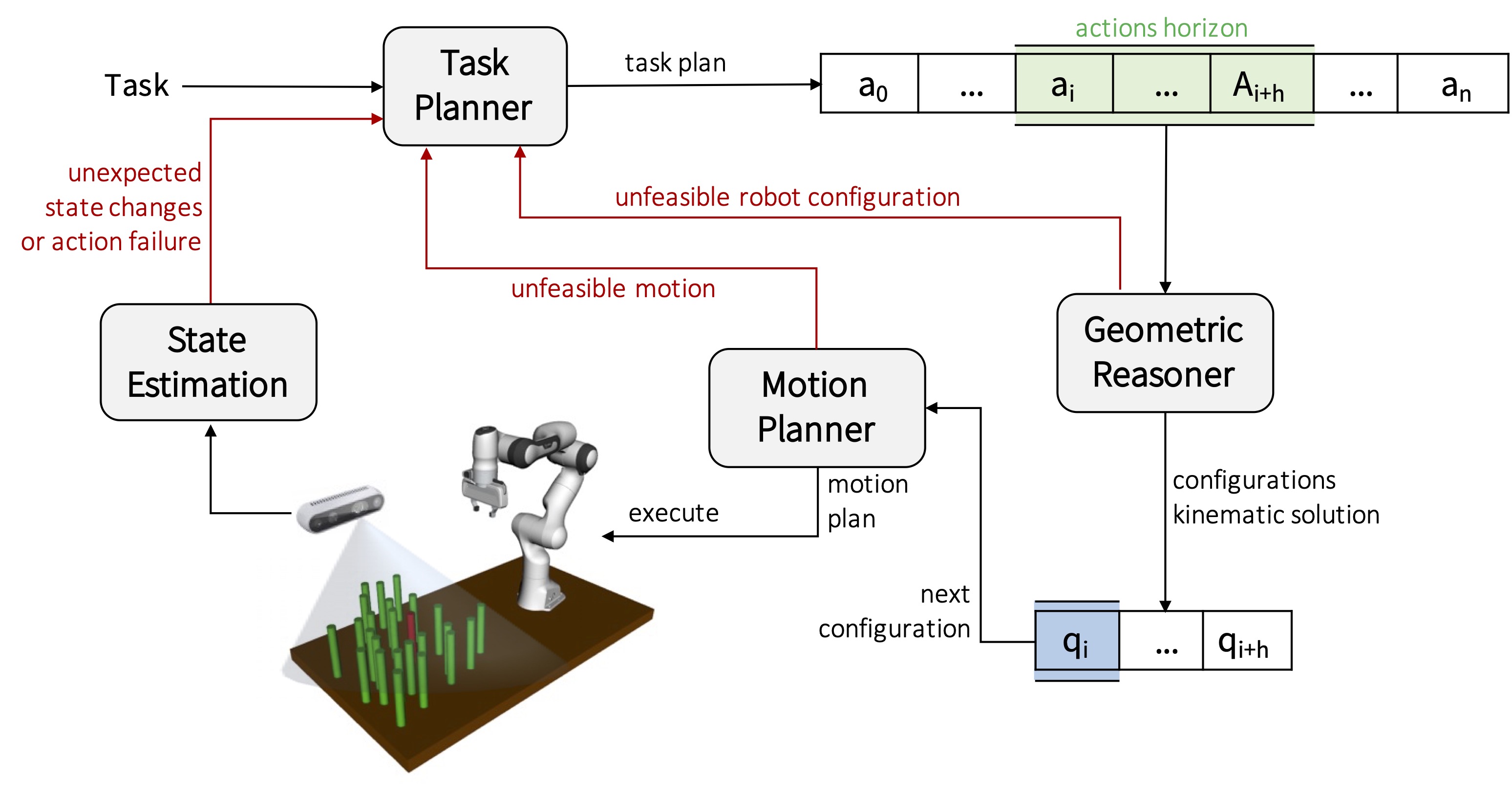
An overview of the Receding Horizon TAMP method. Given a target task, a geometric reasoning module iteratively evaluates the feasibility of a sequence of h+1 actions (the actions horizon) considered over the full set of n actions provided by the task planner. Hence, the motion planner guides the robot toward the first available configuration qj, and the process restarts by moving forward of one step the actions window of size h+1. If the plan is not feasible, the action fails, or the state of the system changes unexpectedly, the task planner should be executed again.